A Method to Suggest Alternative Routes Based on Analysis of Automobiles’ Trajectories
This is a brief explanation of the proposed Trajectory Outlier Detection and Segmentation (TODS) algorithm presented in the XLIV Latin American Computer Conference (CLEI 2018).
Quick summary
A brief summary of this study is available below, and more details are present in the paper at the link (#link).
Abstract—Inexperienced drivers usually use the most-known paths to move inside the cities, while drivers with a better knowledge of the road network normally taken alternative routes that are shorter, faster or safer. This knowledge about roads usage, when shared with other drivers, could offer more paths options to distribute the traffic load across the city by suggesting alternative routes. However, the problem lies in how to suggest alternative route directions for ordinary drivers considering knowledge gathered from experienced drivers. In order to try to solve this problem, it is proposed an algorithm, named TODS - Trajectory Outlier Detection and Segmentation, to group and segment car road trajectories in standard and alternative routes based on city roads usage in different day times periods. After that, the segmentation results are suggested as driving directions for ordinary drivers. To evaluate the results was performed a qualitative comparison with TRA-SOD algorithm considering the segmentation process. The tests were executed using two trajectories datasets collected by drivers in San Francisco - USA and Joinville - Brazil. The results assessment indicate that TODS is superior to TRA-SOD due to its segmentation characteristics. Besides that, it has been observed that the time period of the day influences how routes are used along the day.
Pseudo-code
The macro pseudo-code related with the TODS algorithm are presented following.
TODS Algorithm
Program: SH, EH, SR, ER, I, SD, σ, D, θ, KS
t ← FindTrajectories(SR, ER)
for i ← 0 to Length(t) do
FilterNoisePoints(t[i], SD, σ)
InterpolatePoints(t[i], I)
end for
C ← GetCandidates(t, SH, EH, SR, ER)
idx ← CreateClusteringGrid(C, D)
GT ← GetTrajectoriesGroups(C, idx)
SGT ← GetStandardTrajectories(GT, KS)
R ← GetTrajectoriesRoutes(GT, SGT, D, θ)
return SGT, R
TODS - Trajectory grouping
Program: C, idx
SortTrajectories(C)
GT ← CreateSetStructure()
for c ∈ C do
currentGroup ← empty
for G ∈ GT do
if FitInGroup(c, G, idx) then
currentGroup ← G
break
end if
end for
if currentGroup = empty then
currentGroup ← CreateGroup()
AddGroup(GT, currentGroup)
end if
AddCandidate(currentGroup, c)
end for
return GT
TODS - Trajectory segmentation
Program: GT, STG, NSTG, D, θ
res ← CreateList()
for C ∈ NSTG do
for p ∈ C.points do
p.std ← HasNear(STG, p, D)
end for
for p ∈ C.points do
if p.std = FALSE then
BackExtension(p, C, STG, D, θ)
FrontExtension(p, C, STG, D, θ)
end if
end for
R ← CreateRoute()
Split(R.DS, R.NDS, C)
AddRoute(res, R)
end for
return res
Repository
The repository available in GitHub is organized as follows.
Estatísticasfolder contains results obtained from tests and R scripts used to generate graphs.Estatísticas-lastfolder contains the results obtained and R scripts used to write the paper.mapsfolder contains some results related to the comparison between TODS and TRA-SOD algorithms.trajectory_outlier_detection_appcontains the application source code, inside this folder we have the following:databasemodule is used to query trajectory points. This module has support to PostgreSQL with the PostGIS extension or MongoDB with the geospatial query extensions.httpmodule contains the WEB interfaces.trajectorymodule contains the implementations of TODS and TRA-SOD.webappcontains the WEB pages.
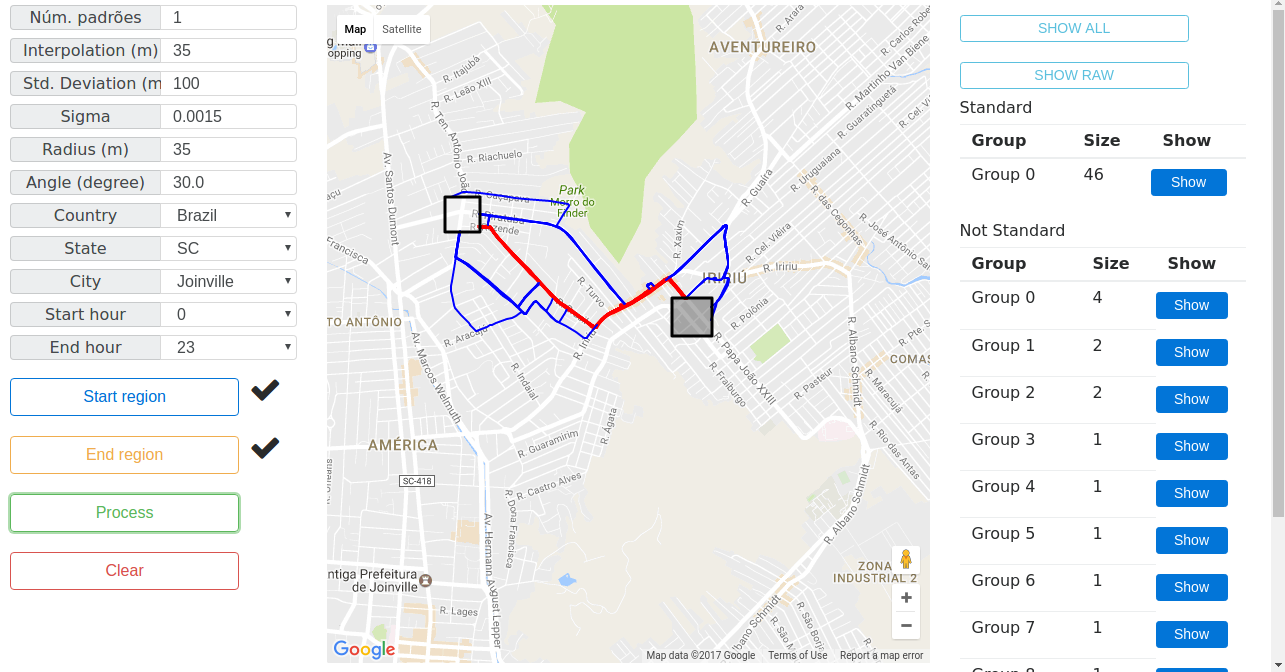
To start the application is necessary to configure the database according to the “database” module (PostgreSQL or MongoDB). After the database was loaded, is necessary to configure the WEB app in Apache Tomcat and start the app. Finally, the application page to use the TODS is presented below.
For further details access the paper in the following link IEEExplore.